
頭部姿勢推定を簡易実装する

はじめに
頭部姿勢推定は、顔の向きや角度を計算する技術です。
この記事では、複雑なパラメーターを使用せず、簡易的な方法を用いて頭部姿勢を推定する方法を紹介します。具体的には、顔のランドマークを利用して三角形をつくり、その重心から顔の向きを2D平面上で推定します。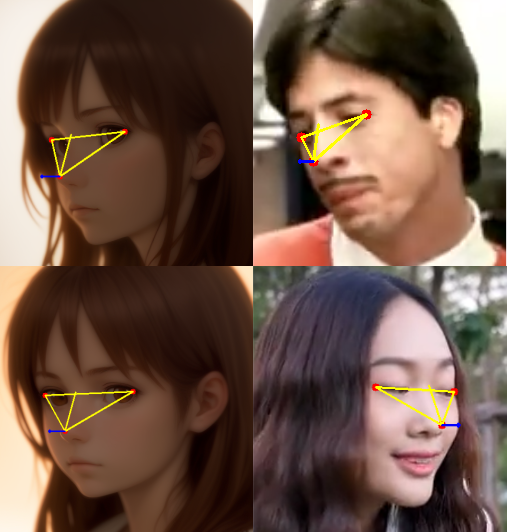
通常、頭部姿勢推定にはカメラの
- 内部パラメーター
- 外部パラメーター
が必要となります。内部パラメーターは、カメラの焦点距離や画像の中心点などを表すパラメーターで、カメラごとに異なります。外部パラメーターは、カメラの位置や向きを表すパラメーターで、カメラの位置や向きが変わると変化します。
これらのパラメーターを用いて、以下のような図が得られます。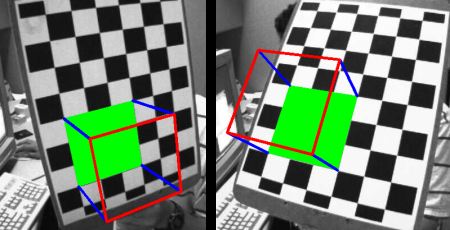
あるいはこちらのリポジトリでは、深層学習を用いて頭部姿勢を推定する方法も紹介されています。
しかしながら実際は、これらのパラメーターを正確に求めようとすると大変です。また、深層学習を用いた方法は、計算量が多くなってしまいます。
この記事では、これらの複雑なパラメーターを使用せず、簡易的な方法を用いて頭部姿勢を推定する方法を紹介します。
顔のランドマークを利用して三角形をつくり、その重心から顔の向きを2D平面上で推定します。
アルゴリズム
- 両目を結ぶ直線の分析
- この直線が水平に近い場合、顔は正面を向いている可能性が高い。
- この直線が傾いている場合、顔が左右に傾いている可能性がある。この傾きの度合いは、顔の傾きの度合いを示す。
- 左目、右目、鼻の頂点を結ぶ三角形の分析
- 三角形の形状や大きさを分析することで、顔の向きを推定。
- 三角形の重心と鼻の頂点の位置関係を分析することで、顔の左右の向きを推定。
- 鼻筋の直線の分析
- この直線の長さや位置を分析することで、顔が上下に傾いているかを推定。
- 鼻筋の直線が三角形の底辺の中央を通る場合、顔は正面を向いていると推定。
- 鼻筋の直線が三角形の底辺の左側を通る場合、顔は左に向いていると推定。
- 鼻筋の直線が三角形の底辺の右側を通る場合、顔は右に向いていると推定。
実装
import sys
sys.path.append('/usr/lib/python3/dist-packages')
import cv2
import mediapipe as mp
import numpy as np
# mediapipeの顔ランドマークの初期化
mp_face_mesh = mp.solutions.face_mesh
mp_drawing = mp.solutions.drawing_utils
face_mesh = mp_face_mesh.FaceMesh()
# 画像を読み込み、RGB形式に変換
# image = cv2.imread("assets/input_1.png")
# image = cv2.imread("assets/input_2.png")
# image = cv2.imread("assets/input_3.png")
# image = cv2.imread("assets/input_4.png")
image = cv2.imread("assets/input_5.png")
if __name__ == "__main__":
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 顔ランドマークの検出を行い、結果を取得
results = face_mesh.process(image_rgb)
# 2Dランドマークの座標を取得して、顔の向きを描画
if results.multi_face_landmarks:
for face_landmarks in results.multi_face_landmarks:
# 顔の全てのランドマークを描画
# mp_drawing.draw_landmarks(image, face_landmarks, mp_face_mesh.FACEMESH_CONTOURS)
# ランドマークの座標を取得
left_eye_left = tuple(map(int, [face_landmarks.landmark[33].x * image.shape[1], face_landmarks.landmark[33].y * image.shape[0]]))
right_eye_right = tuple(map(int, [face_landmarks.landmark[263].x * image.shape[1], face_landmarks.landmark[263].y * image.shape[0]]))
# 鼻の頂点のランドマークを取得
nose_top = tuple(map(int, [face_landmarks.landmark[4].x * image.shape[1], face_landmarks.landmark[4].y * image.shape[0]]))
# もしランドマーク4が誤検出している場合は、ランドマーク6を使用
"""
ここでの`20`は、鼻の頂点のランドマーク(`nose_top`)と左目の左端のランドマーク(`face_landmarks.landmark[33]`)のY座標の差の許容範囲を示す。
具体的には、`nose_top`と`face_landmarks.landmark[33]`のY座標の差が20ピクセル未満であれば、ランドマーク4が誤検出していると判断し、ランドマーク6を`nose_top`として使用する。
実際の画像やカメラの角度、顔の位置などによって適切な値が変わるので、確認しながら調整する必要あり。
"""
if abs(nose_top[1] - (face_landmarks.landmark[33].y * image.shape[0])) < 20: # 20は適切な値に調整
nose_top = tuple(map(int, [face_landmarks.landmark[6].x * image.shape[1], face_landmarks.landmark[6].y * image.shape[0]]))
# 鼻筋のランドマークを取得
if face_landmarks.landmark[1].visibility < 0.5: # ランドマーク1が見えない場合
nose_bottom = tuple(map(int, [face_landmarks.landmark[4].x * image.shape[1], face_landmarks.landmark[4].y * image.shape[0]]))
else:
nose_bottom = tuple(map(int, [face_landmarks.landmark[1].x * image.shape[1], face_landmarks.landmark[1].y * image.shape[0]]))
# 各ランドマークの位置に小さな円を描画
cv2.circle(image, left_eye_left, 5, (0, 0, 255), -1)
cv2.circle(image, right_eye_right, 5, (0, 0, 255), -1)
cv2.circle(image, nose_top, 5, (0, 0, 255), -1)
# 三角形を描画
triangle_pts = np.array([left_eye_left, right_eye_right, nose_top])
cv2.polylines(image, [triangle_pts], isClosed=True, color=(0,255,255), thickness=2)
# 鼻筋の直線を描画
nose_bottom = tuple(map(int, [face_landmarks.landmark[168].x * image.shape[1], face_landmarks.landmark[168].y * image.shape[0]]))
cv2.line(image, nose_top, nose_bottom, (0,255,255), 2)
# 三角形の重心を計算
centroid = (
(left_eye_left[0] + right_eye_right[0] + nose_top[0]) / 3,
(left_eye_left[1] + right_eye_right[1] + nose_top[1]) / 3
)
# 三角形の重心と鼻の頂点とのX軸上の距離を計算
distance_x = nose_top[0] - centroid[0]
# 矢印の長さを計算(上限を100pxとする)
arrow_length = min(abs(distance_x), 100) * np.sign(distance_x) # np.signは符号を取得する関数
# 矢印の方向ベクトルをX軸に制限
direction = np.array([arrow_length, 0])
# 顔の向きを示す矢印を描画
arrow_end = tuple(map(int, nose_top + direction))
cv2.arrowedLine(image, nose_top, arrow_end, (255,0,0), 2)
# 画像を表示
cv2.imshow("Output", image)
cv2.waitKey(0)
cv2.destroyAllWindows()顔の向きがきつい時、一部のランドマークが検出できない可能性があります。そのため、コード中ではいくつかのランドマークを選びなおせるようにしています。
出力結果
見にくいですが、青の矢印が顔の向きを表しています。
顔の向きがきついほど、矢印の長さが長くなります。(上限100px)
実際に使用する時は、このような描画は必要ないので、極めて高速な動作が期待されます。
デメリットとして、完全に左右を向いてしまうと、顔の向きを推定できなくなってしまいます。あまり厳密に推定する必要がない場合は、この方法を用いることで、簡易的に頭部姿勢を推定できます。
以上です。ありがとうございました。

